プロジェクト
【高齢者の立位姿勢の力学モデリングならびに姿勢制御シミュレーョン
〜転倒防止に向けて (太田裕治・水村真由美・吉田真咲)】
目的
ヒトの静止立位姿勢は,狭い支持面に対し身体重心位置が高く機械力学的に不安定である.この立位姿勢を,ヒトは神経-筋-骨格システムを利用し巧みに維持している.このように維持される立位姿勢は,日常生活における様々な運動の基盤であるにもかかわらず,その制御メカニズムは十分に理解されていない.とくに,現在増え続けている高齢者の立位姿勢制御についての知見は不十分と考えられる.その原因として,高齢者の運動データの欠如,計測項目の偏り,実計測と運動モデルの乖離などが考えられる.そこで,本研究では,距離計測機能を有するカメラである3次元距離カメラを用い,3次元的な身体動揺計測を行うと同時に,力学モデルやシミュレーションを用いて多角的に考察することで,ヒトの静止立位姿勢制御について新たな仮説を立てることを目的とした.
本研究では,以下の2項目を実施した.
- ヒトの静止立位運動を運動モデルをベースにシミュレートした.すなわち,足関節運動により維持される立位姿勢(1由度の剛体倒立振子),並びに,足関節および股関節運動により維持される立位姿勢(2自由度モデル)に対し,様々な初期条件・仮定を与えた上で,姿勢揺動をシミュレートした.
- 被験者計測実験を通じて,上記運動モデル内部のパラメータを評価した.すなわち,様々な運動能力の高齢者を対象に,静止立位時の姿勢維持運動を計測することで,モデル内部の各種パラメータ同定を行い倒立振子モデルを評価した.必要であれば,実測データに基づき,1)に戻りモデルの改良を行った.計測対象としては,健常高齢者のほか,関節症などの運動器疾患者,虚弱高齢者なども含めた.
以下に成果の概要を報告する.
3 次元距離カメラを用いた非侵襲評価法ならびに臨床計測(フィールド計測)
本研究では3次元距離カメラを用いて,静止立位時の身体動揺量を計測した.同カメラは,通常映像以外に距離映像を出力することが特徴であり,両画像から得られる情報に基づき,現実空間での物体座標を算出し,静止立位時の身体動揺量を3次元的に簡便に計測した.本研究で用いた3元距離カメラ (TZG01, Baumer Co. Switzerland)については,カメラから距離 2〜3 m 近辺において計測変位誤差が0.7mm程度と高精度が得られることを確認しており,この距離に被験者を立位させフィールド計測を実施した.
健常高齢者 15 名(73±6.6歳),および,健常若齢者5名(23±1歳)を対象に,ToFカメラを用いて開眼時および閉眼時の静止立位時前後動揺量を,また,同時に足圧中心計を用い足圧中心(COP: center of pressure)の計測を行った.実験条件は室内照度 650 Lux,サンプリングレートは20fpsとした.
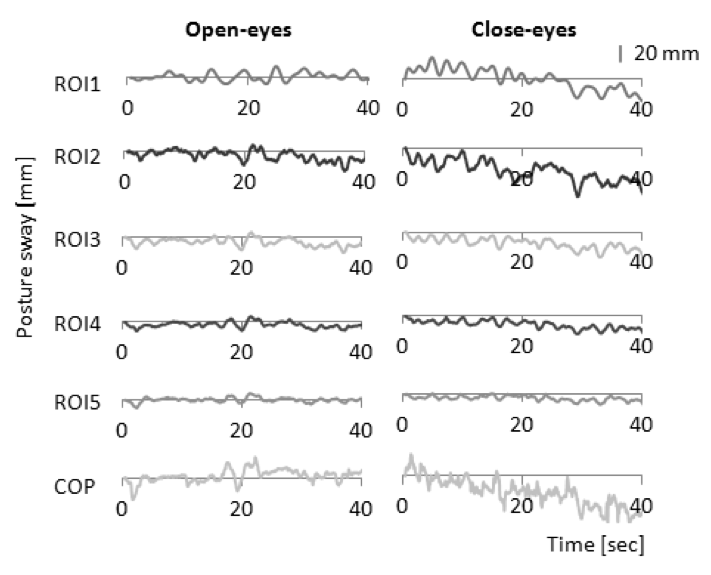
距離測定領域は,頭部(ROI1),頸部(ROI2),両肩峰(ROI3),背部(ROI4),腰部(ROI5)であり,距離映像に対し前記各位置に3x3 pixelのROI(Region of Interest)を設け水平距離の時間変動を算出した.計測例(女性,78歳)を右図に示す.
開眼時では視覚フィードバックが掛かるが,閉眼時には視覚フィードバックが掛からず,徐々に前傾姿勢を取ることが分かる.また,若齢者実験を通じて,若齢者はほぼ足関節により静止立位姿勢を維持する傾向が見られたのに対し,高齢者は股関節と足関節の両関節により静止立位姿勢を維持する傾向が強いことがわかった.
静止立位姿勢のモデル化およびシミュレーション
Hettich の倒立二重振子モデルをベースに,数値計算言語 Matlab (MathWorks Co.)を用いてシミュレーションを行った.生体運動では一般的に運動エネルギ最小化の原理が働くと考えられることから,足関節運動ならびに股関節運動,夫々の姿勢維持動作に関し,運動エネルギの大小の観点からシミュレーション結果を評価し,ヒトの姿勢制御戦略を考察した. 具体的には,ゼロモーメントポイント(ZMP) を設定し,上半身(1リンク)と下半身(2リンク)の重み行列を変化させることで,前傾姿勢から静止立位に復するまでに必要なエネルギを求めた.その結果,ほぼ足関節のみで静止立位姿勢にする場合,股関節を用いた場合と比較し,約3倍ものエネルギを必要とすることがわかった.このことは,若齢者がほぼ足関節のみで静止立位姿勢を維持しようとするのに対し,高齢者では,股関節と足関節の 両関節を使って制御しているという実測結果と符合すると考えられた.
さらに,これまでに実施してきた立位計測実験を通じて,姿勢制御は非線形的であることが分かってきている.すなわち,身体重心点が両足支持基底面のほぼ中心にあるときは,極く小刻みに身体を前後(左右)に運動させて立位姿勢を維持するが,一方で,偶々大きく前傾した時などには,大きなトルクにより身体を勢い良く後方に戻す動作も見られる.すなわち,身体の鉛直傾斜角が小さい時と大きい時では,フィードバックゲインが異なる状況が観察される.これに対しては,モデル内パラメータに角度依存性の不感帯を設けるなどして非線形化を図りシミュレーションを実施した.
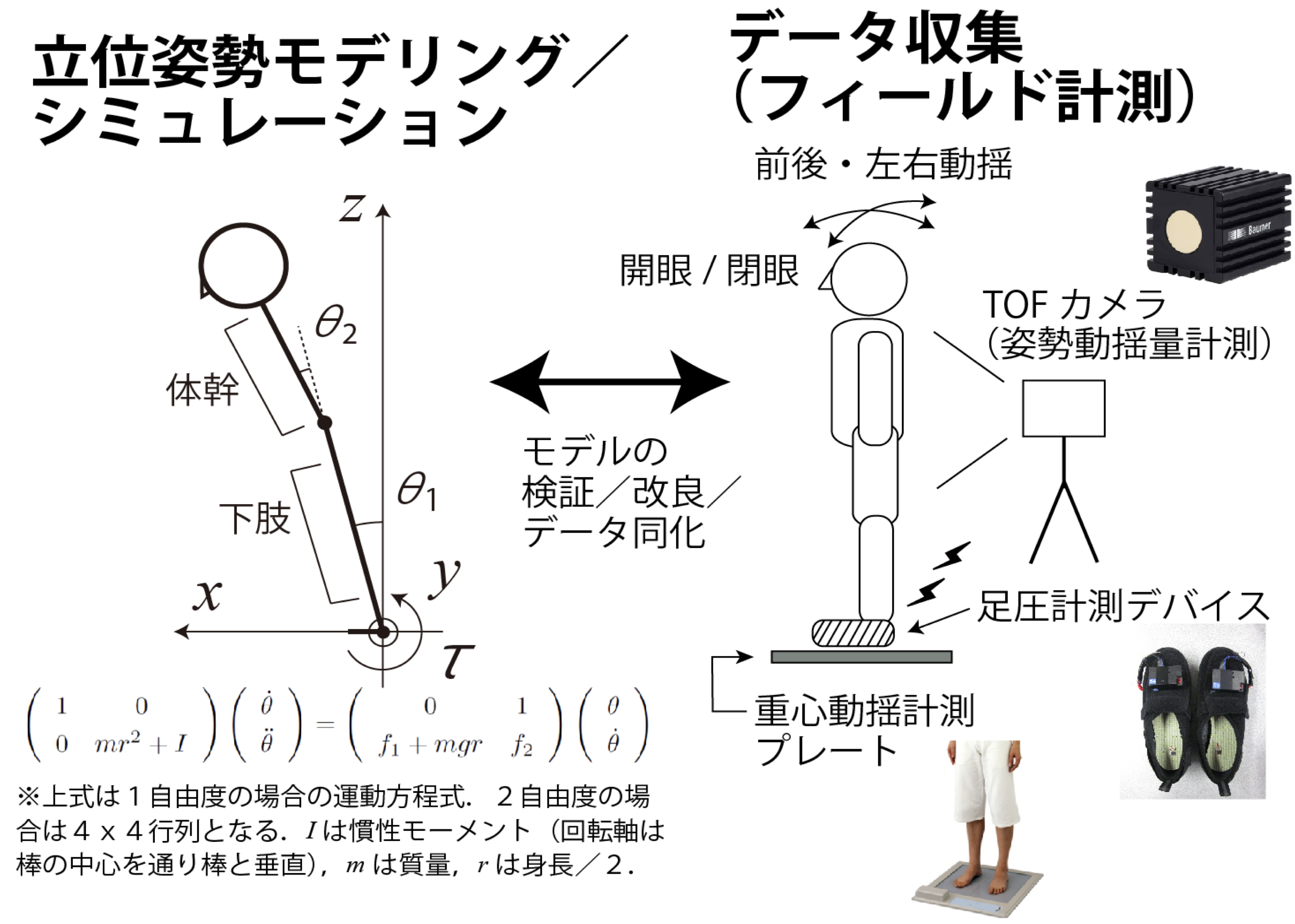
結論として,本研究では,まず,3 次元身体動揺を簡便に計測するツールを開発することを目的とした.ToFカメラを用いた3 次元計測はフィールドにおいて,安全かつ簡便に利用可能であることが分かり,今後も計測・リハビリ分野において広く活用されることが期待される.また,今回作成したシステムおよびシミュレーションから得られたデータから,高齢者の立位姿勢制御に関して新しい仮説を立てることができた.研究全体の概略を以下の図として示すことで報告を終える.
研究発表
- 酒井英里(お茶の水女子大学)他、「3次元距離カメラを用いた静止立位姿勢動揺の非侵襲計測およびシミュレーション」 第12回姿勢と歩行研究会 2014年3月8日
