プロジェクト
【高齢者の立位姿勢の力学モデリングならびに姿勢制御シミュレーション
〜転倒防止に向けて〜(太田裕治・水村真由美)】
救急搬送される高齢者の7〜8割は転倒が原因とする報告書(東京消防庁、2011年11月)が示すように、高齢化率23.1%を迎えた我が国では高齢者の転倒は大きな問題となっています。 転倒から骨折に至るケースでは、寝たきりとなることも多く、生活の質も著しく低下するため、効果的な転倒予防対策の実施が急務です。 転倒要因には様々な因子が考えられますが、身体機能の観点からは、1歩行機能、2バランス機能、3下肢筋力が重要となります。 本研究申請では2項、とくに、静止立位時の身体バランス機能に着目し、その機能を維持・向上させるための方法に関し、バイオメカニクス的観点から研究を行いました。 具体的には、静止立位姿勢の運動シミュレーションを目標に、モデル化並びに、モデルパラメータの決定のために必要となる生体計測実験を並行して行いました。 すなわち、図1右に示すように、静止立位時の姿勢維持運動を定量計測するとともに、その計測データに基づき、同図左のごとくモデル化を行いました。
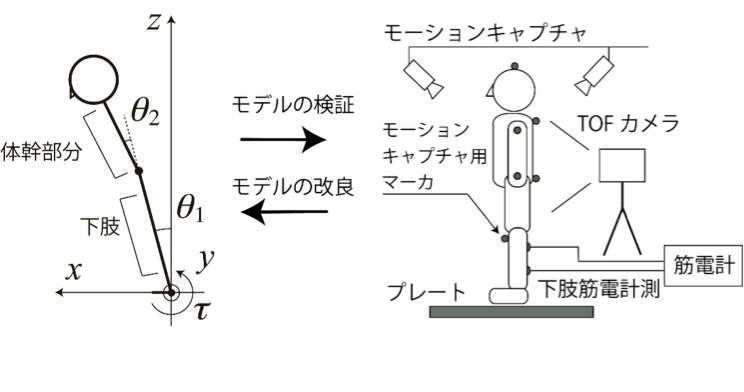
図1:静止立位姿勢のモデル化と姿勢動揺計測(パラメータ同定)
(1) 静止立位時の運動データ収集
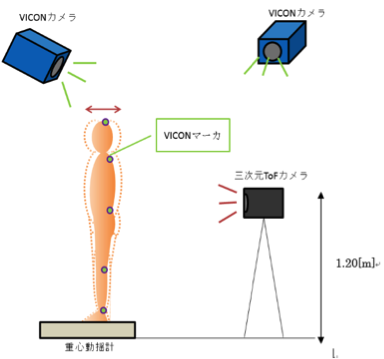
図1右に示すシステムに基づき、被験者(健常中年男性1名)を対象に運動データの収集を行いました。 目的は、計測システムの信頼性検証ならびに、モデルパラメータの確立である。計測項目は、(a)身体各部位の運動(キネマティクス)、(b)床面からの反力(キネティクス)、(c)下肢筋の筋放電とした。 計測対象を開眼ならびに閉眼状態にてプレート上に立たせ、運動に伴う一連のデータを取得しました。 (a)項の運動計測に関しては、モーションキャプチャシステム(Vicon System)ならびにTOFカメラ(Baumer, TZG01)を用います。 TOFカメラによる計測は、モーションキャプチャシステムと比べ精度やサンプリングレートで劣るものの、無侵襲性・簡便性に優れるため、高齢者を対象とした現場計測に有効活用可能です。
TOFカメラによる運動計測結果例を図2に示します。 図左に示すように被験者の身体上に複数の赤外マーカを設置し、それを周囲に配置した7台のVICONカメラにより撮影し、運動に伴う各マーカの3次元空間位置変動を100Hzで計測しました。 同時にTOFカメラにより被験者の背面を撮影し、その前後揺動量を動画記録しました(図右、動画の1コマ)。 本カメラの計測原理は赤外線を利用した「Time-of-Flight(飛行時間計測)」方式であり、カメラ前面に設置されたLED光源から発光された赤外線が対象物体で反射し戻るまでの位相差(時間)を計測することで、 その物体までの距離を取得します。この方法により、立位状態にある背面全体の運動状態が非接触計測されます。 記録された距離画像の輝度値はフルスケール16bitです。輝度値&H0000 がカメラ前面(0cm)を、&HFFFFが5mに相当することから、画素値に応じて距離が線形算出されます。
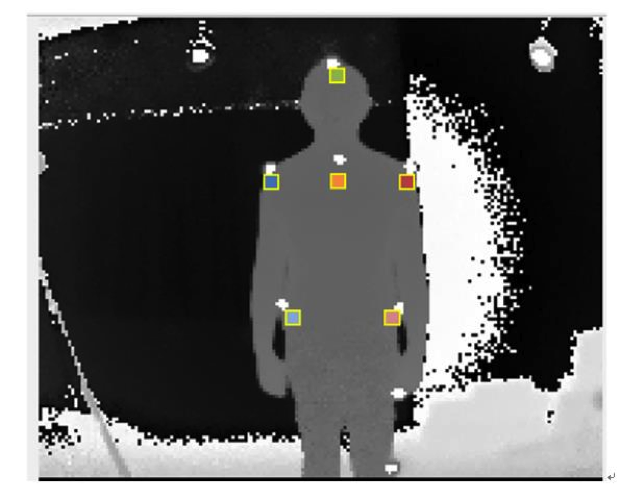
カメラからの距離の時間変動を算出した結果を図3に示します。 図2の背面写真内に設定した3x3ピクセル領域の平均濃度の時間変化(=前後距離揺動)をグラフ化したものです。 生データは布地や周囲光などの影響により、ノイズを含んでおり、10点の平均化処理を行いました。TOFカメラの撮影レートは20fpsと設定しましたので、2Hzのサンプリングレートとなります。 計測ポイントは、頭部、首、両肩、両腰の計6か所と設定しました(いずれも背面)。グラフに示すように、周期5秒程度の前後方向ゆれが、各計測点で同相で生じていることがわかります。 この計測例では、おもに足関節を中心に身体全体が前後揺動したと考えられます。 計測データに関しては、これ以外に、重心動揺計(マットスキャン、ニッタ製、サンプリングレート20Hz)による立位時の足圧中心位置変動、フォースプレート(Kistler製)による床反力(垂直方向反力成分ならびに水平方向反力成分)、 TOFカメラによる身体の左右動揺量(身体側面 に鏡を設置する)を収集しモデル化に供しました。
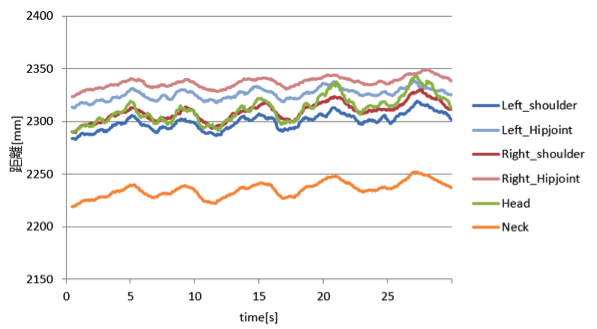
図3:TOFカメラによる距離計測の例
(2) 立位状態のモデル化
次に、ヒトの静止立位時の姿勢制御の力学モデル化を検討しました。第一段階として、図4に示すように、リンク下端に回転軸を有する1自由度の前後揺動・倒立振子モデルとして近似しました。 モデル作成に際しては、Masani et al.(J Neurophysiol. 2008;100(3):1465-75.), Peterka(IEEE Eng Med Biol Mag. 2003;22:63-68.)らのモデルを参照しました。 このモデルにおける下端回転軸は足関節の制御運動をシミュレートしたものです。
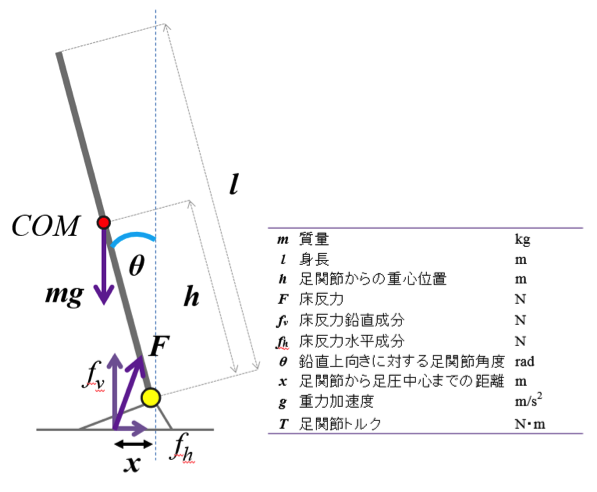
図4:立位状態のモデル化(1自由度)
上記モデルの運動方程式は、

と表せます。ここで、θ(t)は身体が鉛直線となす角度の時間変化、mは身体質量、Iは足関節周りの身体慣性モーメント(身長体重から算出.質量分布は均一と仮定。)、
hは足関節から身体重心(COM)までの距離、gは重力加速度、T(t)は足関節が発揮するトルクです。
T(t)については、さらに、x(t)を足関節を基点に計測した足圧中心位置(前後方向)の時間変化とすると、

となります。Fは床反力ベクトルです。静止立位時においては、F ≈ mgと考えられ∗、

となります。式(1)〜(3)より、

となります。以上のタラメータのうち、θ(t)はTOFカメラから取得しました(図2における背面首部の距離変動を角度値に換算)。
また、x(t)は重心動揺計から、足圧中心の前後方向移動データとして取得しました。
以上のモデルならびに取得データに基づき、残る1個のパラメータであるhを最小二乗法にて求めることが可能となりました。
∗ フォースプレートによる計測から、図4のfh(水平方向成分)はFに対し僅かであり無視できること、
また、姿勢運動に伴うFの鉛直方向成分の変動量(増減)も微小であることを確認しています。
(3) 高齢者データの収集
高齢者を中心とする被験者を対象に、静止立位時の身体各部位の運動をフィールド計測しました。 計測項目は(a)カメラによる身体各部位の運動、ならびに、(b)床面反力としました。 後者の計測には、これまでに開発した、靴のインソール部に圧力センサを埋め込み歩行時の足底圧変化をワイヤレス計測するデバイス(靴型重心動揺計)を利用しました。 計測対象は健常高齢者とし、被験者を開眼/閉眼状態でプレート上に立たせた状態で姿勢制御運動を計測しました。 計測フィールドとしては、埼玉県志木市において現在実施されている、高齢者を対象とした健康支援活動の場(カフェランチルーム)を利用しました。 現在までに、健常高齢者を中心に延べ21名(男性1名、女性20名)のデータ収集を完了しました。 加えて、富士温泉病院(甲府市)において運動器疾患者1名(女性)を対象とした計測も実施しました。 また、立位の際のプレートに関しては、安定な硬い床材のみならず、ウレタンフォームなどの柔らかい材料上に立たせたときの不安定状況下での姿勢維持動作も計測し、外乱状況下での姿勢運動の計測も進めています。 それらの計測データに関しては現在分析中ですが、高齢者の場合は疾患などのために様々な姿勢制御運動モードの存在が考えられるため、モデル化に先立って、どのような運動様式が存在するかをまず検討することが重要と考えられます。
(4) 今後の検討課題
以上の検討を通じて、ヒトの静止立位状況をフィールドにて無侵襲計測するシステムを構築するとともに、健常者を対象にデータ収集を行い、まずは、1自由度の運動モデルを確立しました。 今後、2自由度倒立振子モデルへの拡張を行うとともに、外乱条件下での姿勢制御シミュレーションを行い、ヒトの姿勢制御戦略を考察する計画です。 2自由度モデルへの拡張に際しては、①股関節周りのモーメントの仮定法、②最小二乗法による多変数の計算機的決定法、③関節可動域が増大した時の非線形的応答、 ④床反力ベクトルについての考察(上記[が無視し得なくなる可能性)、⑤更なる臨床データ収集により若齢者と高齢者のフィードバック制御の差異の調査、等につき、検討することが必要と考えられます。
