プロジェクト
【災害現場で作業するロボットの
行動知識獲得および関連技術の開発(小林一郎・小口正人・伊藤貴之・渡邉知恵美)】
災害現場など未遭遇の環境においてロボットが行動する際に、自らが危険を自律的に避けるという行動が要求されます。
本申請研究では、このような行動を自律的に実現するために、過去に学習した環境において獲得した行動知識を新しい
環境において利用するための技術を開発することを目的として研究開発を進めています。
実際の取り組みとして、環境(災害現場)の観測・分析をし、ロボットに情報を提供するための基盤技術として、
センサ情報の時系列データへの高速アクセス手法の開発(担当:渡辺)、
行動知識獲得のために過去の行動を俯瞰可能にする行動経路の可視化手法の開発(担当:伊藤)を行い、
災害環境においてロボットとの通信を可能にする頑健な無線通信技術の開発(担当:小口)、
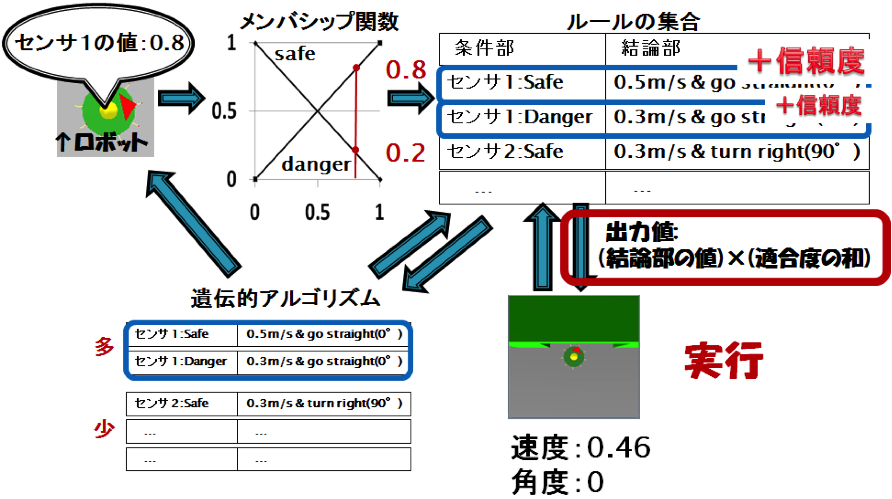
そして、災害現場を想定した未知の環境におけるロボットの行動をシミュレーションすることにより災害現場で利用可能な技術の開発(担当:小林)を行いました。
災害現場においても威力を発揮する頑健な無線通信技術の開発(小口)
災害現場などにおいて役に立つ通信技術には、周囲の環境に対応して柔軟に通信処理設定を行える無線通信基盤が必要です。
本研究では周囲の環境の情報を基に、各プロトコル階層において最適な通信を行うための技術検討を行いました。
具体的には通信プロトコルの下位層であるMAC層におけるCSMA/CAの制御や上位層のTCPなどにおいて、
周囲の情報を取り入れて通信の制御を行う手法について検討しました。
提案したアイディアの評価は、特にある程度規模の大きな無線ネットワークの場合、実環境で評価することは難しいため、
ネットワークシミュレータを用いて評価を行いました。
シミュレーション評価の結果、周囲の環境の情報を用いることにより、効果的に無線リソースを利用する事が可能となり、
性能向上を達成できることがわかりました。
これは災害現場で作業するロボットの通信などに有用な技術となります。
行動経路の可視化による効率的な行動知識獲得手法の開発(伊藤)
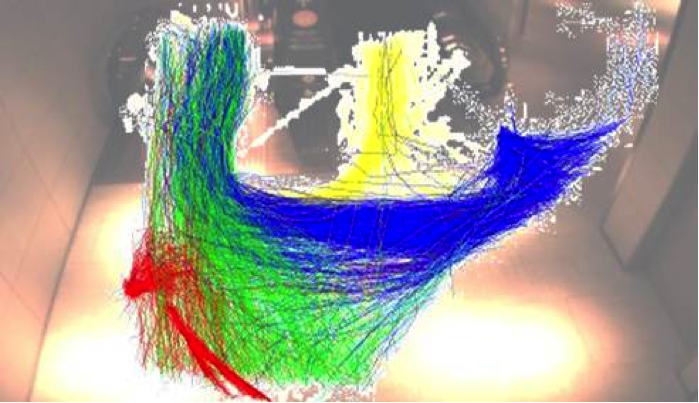
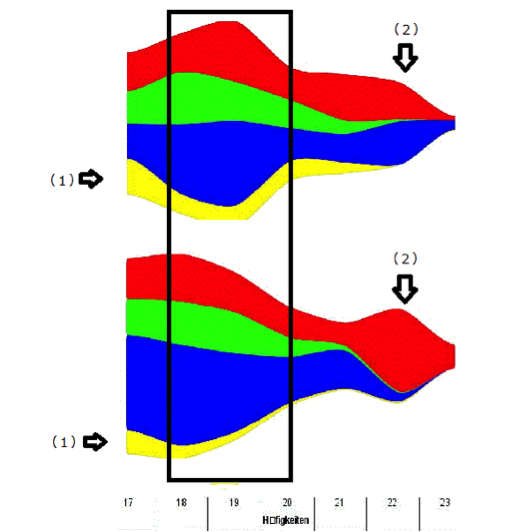
災害現場での人間の避難経路、あるいは災害対策ロボットの避難経路を理解することで、 災害時の安全性確保のための参考資料にすることができます。 本研究ではカメラやセンサで収集した人流情報の要約可視化に取り組みました。 具体的には、異なる時間帯に測定した膨大な数の人流経路情報にクラスタリングを適用し、その流量の時間変化を比較可視化しました。 以下の図は、左はエレベーターまわりの人流測定結果を4種類の経路に分類して4色で表示したもの、 右は異なる曜日における人数の時間変化を示したものです。
観測された時系列データに高速にアクセス・分析する手法の開発(渡辺)
災害状況をロボットが把握しそれに適用した処理を行うためには、
ロボットなどで収集するセンサデータのパターンや特定の状態との類似検索などの機能が必要であり、
データを効果的に圧縮しつつ高速に検索するための工夫が必要となります。
我々は時系列データを量子化・符号化し文字列に置き換えてテキスト検索やテキストマイニングの既存手法を適用する
SAXという手法に着目し、これを高次元時系列データに適用できるよう改良しました。
結果、2次元の時系列データに対して元のデータの1/80の多次元1/80の文字列データを検索用の索引として生成することができ、
それを用いて元データによるマイニング結果と同等な精度のマイニング結果を得ることができました。
上記の研究成果により、災害という特殊な環境において利用可能な頑健なる情報処理技術の開発が行えました。
個々の技術を組み合わせることにより、頑健な無線通信で行動する自律ロボットが観測した時系列データを高速に分析し、
その結果を被災者の端末で可視化し、避難経路を示すなど様々な応用技術の開発が可能になります。
